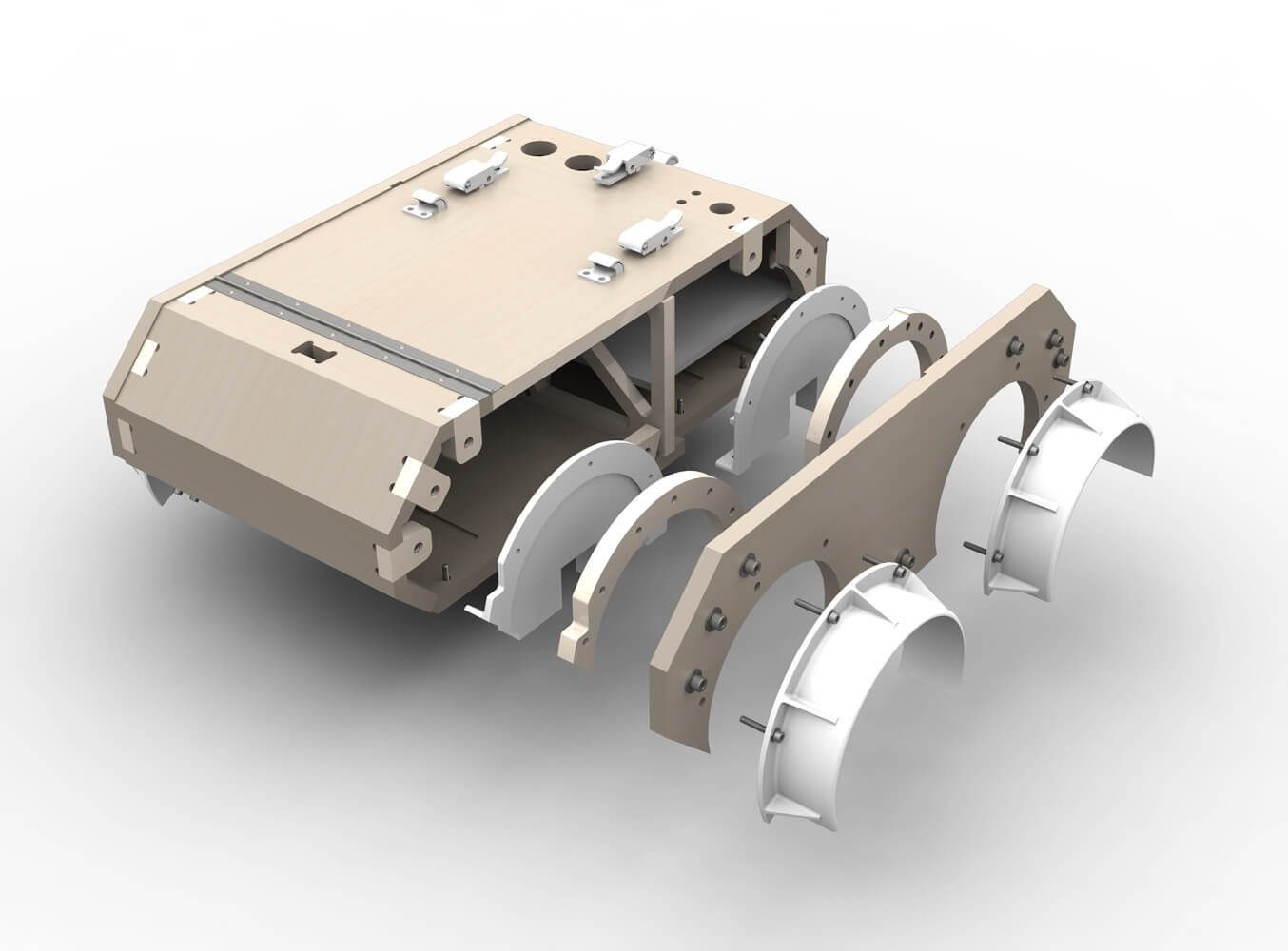
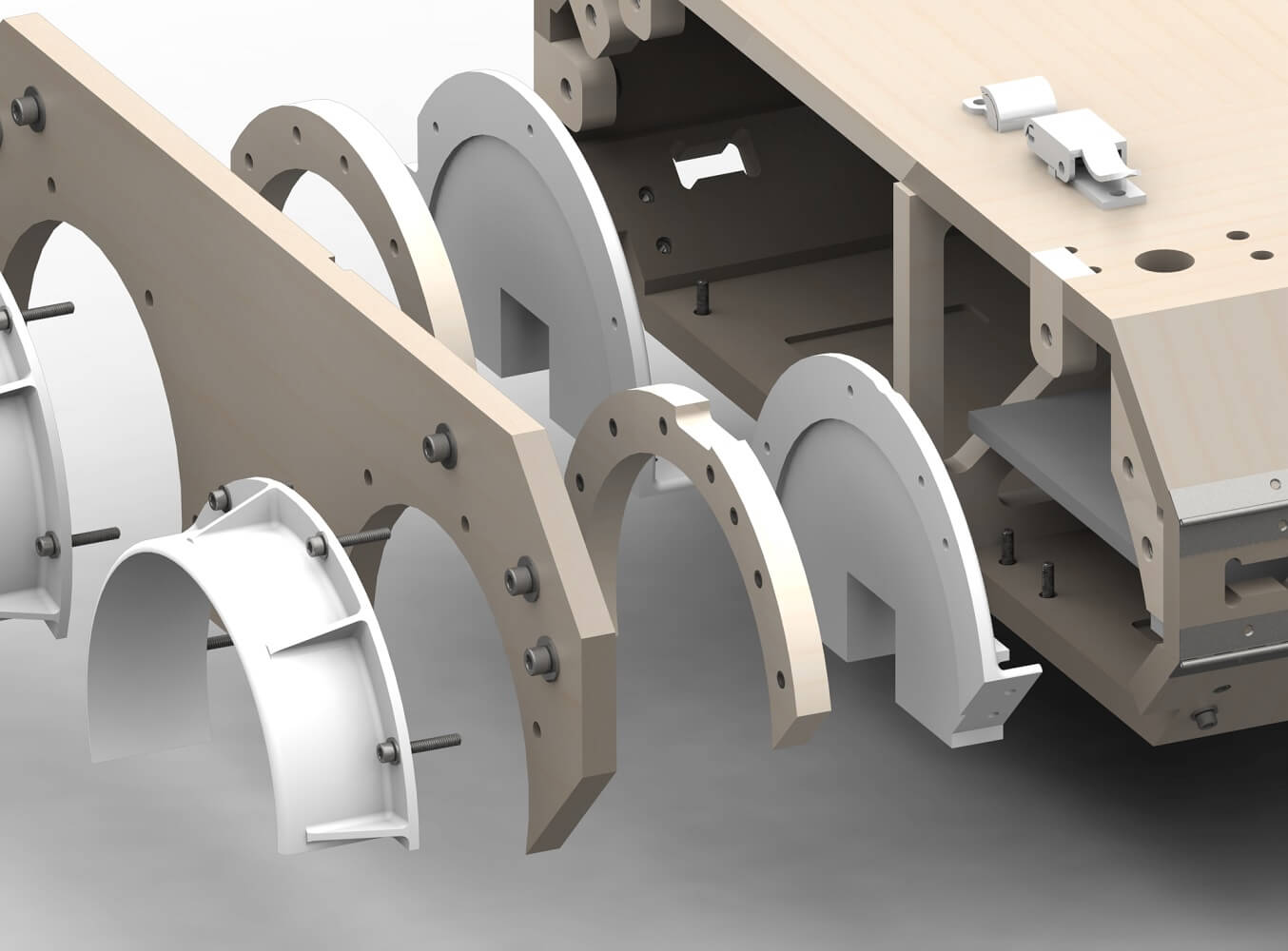
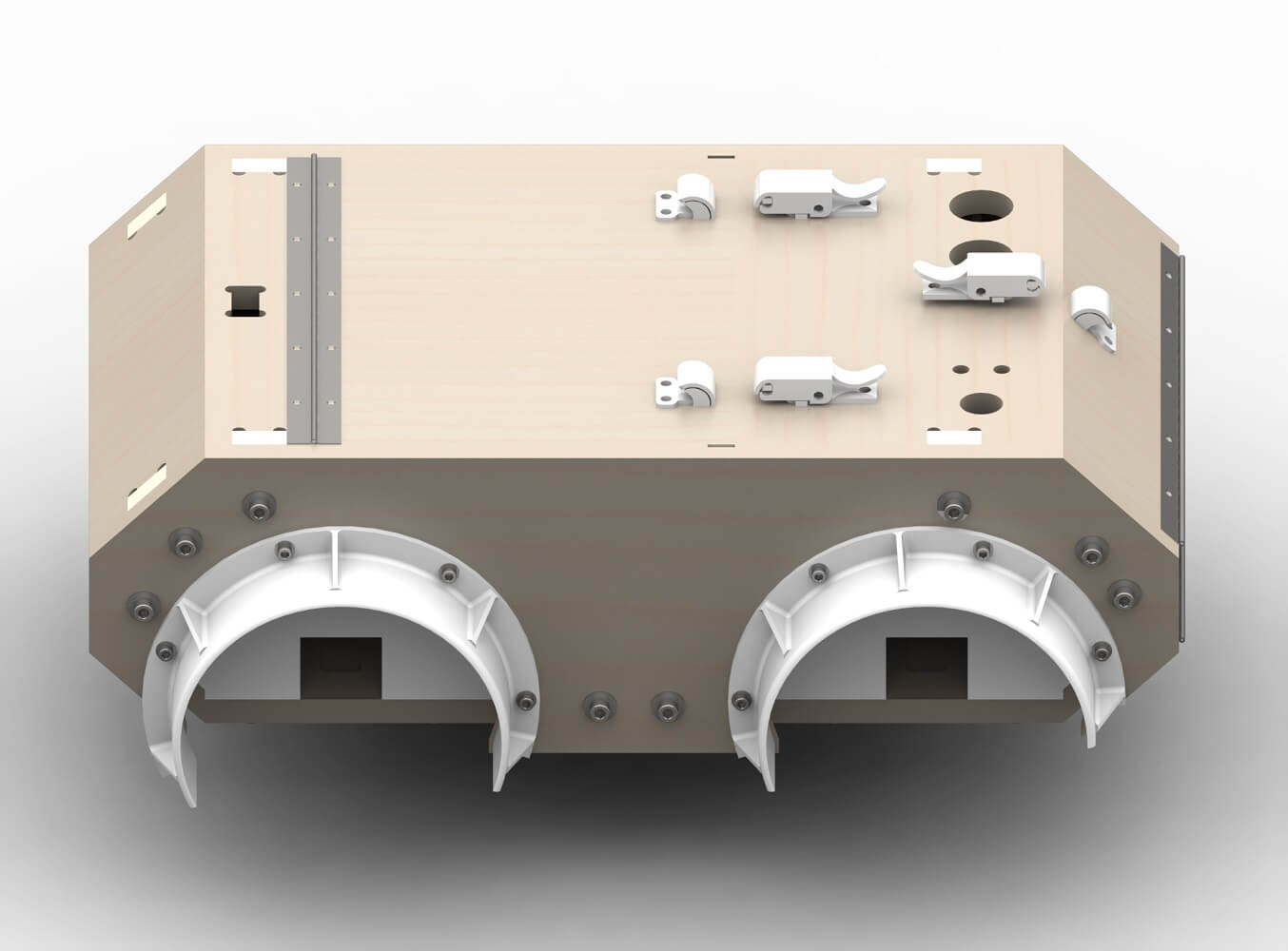
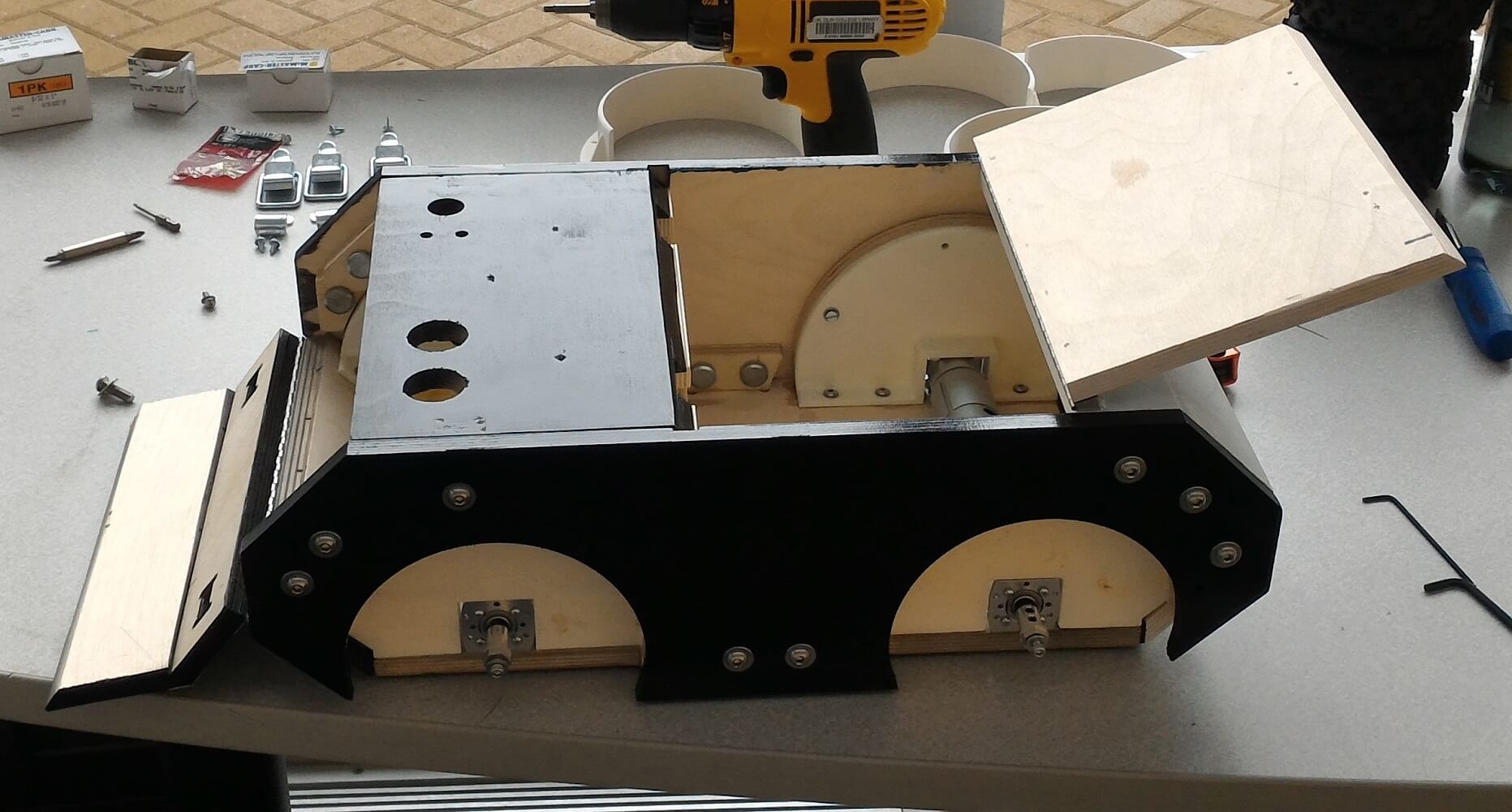
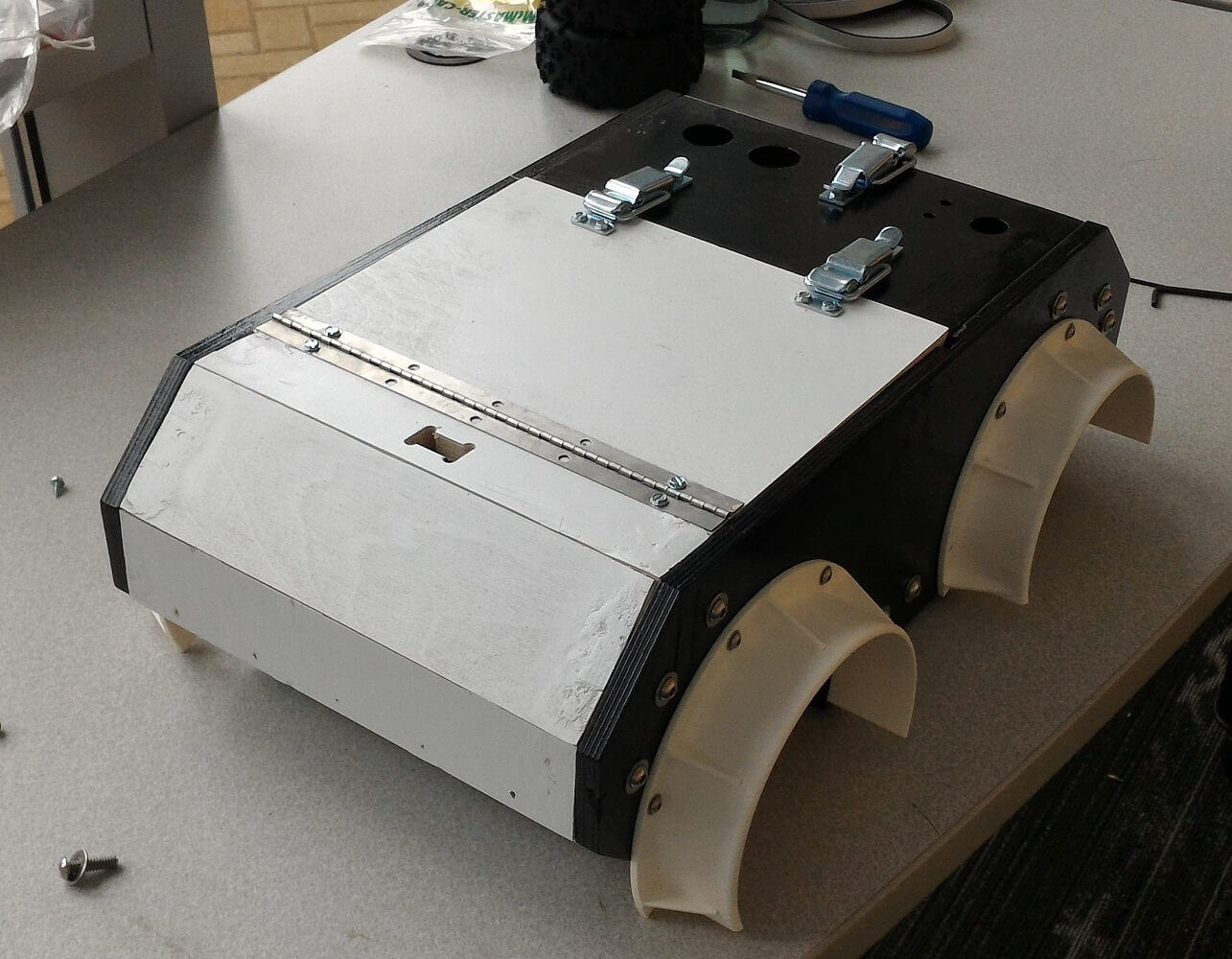
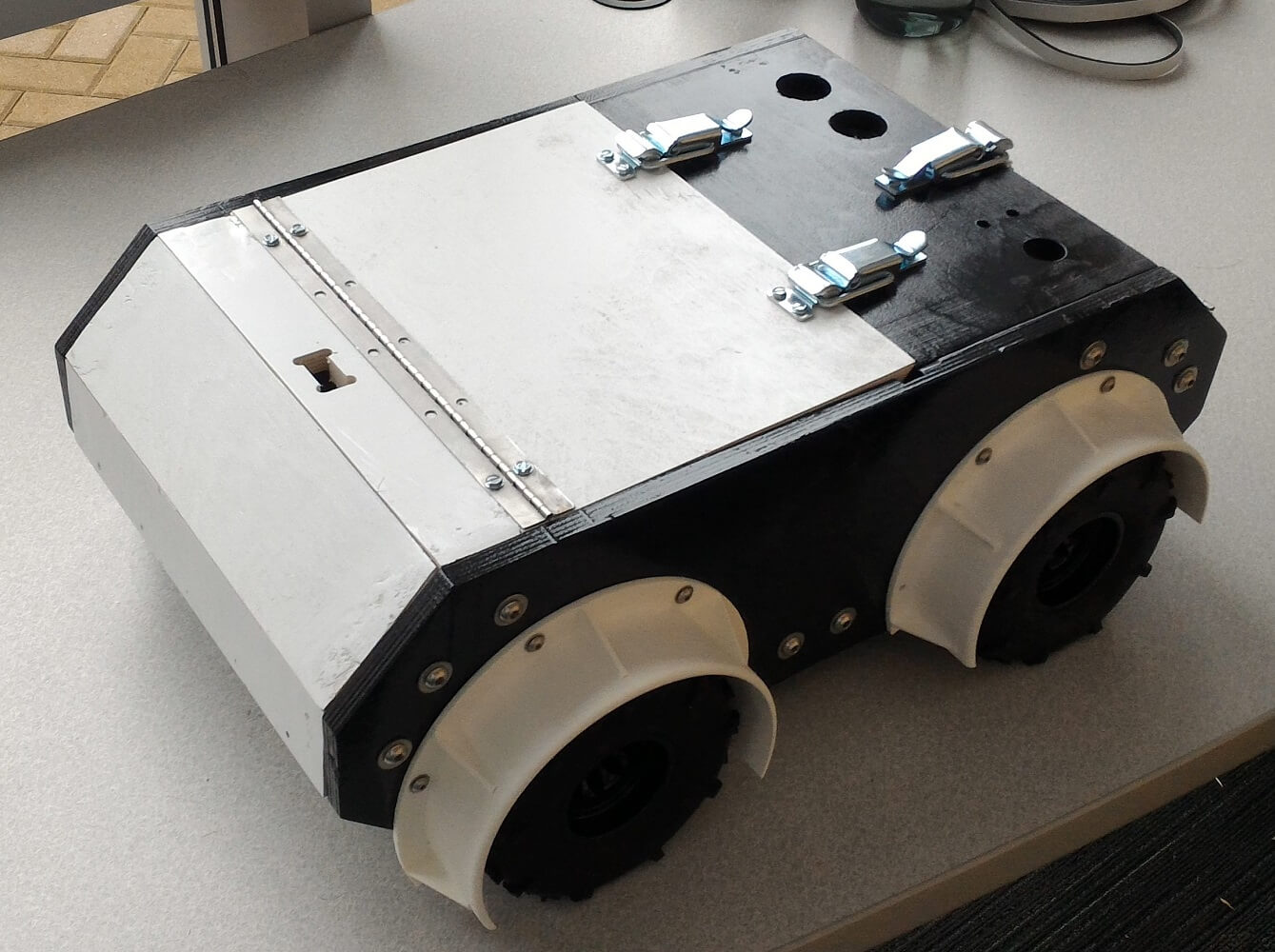
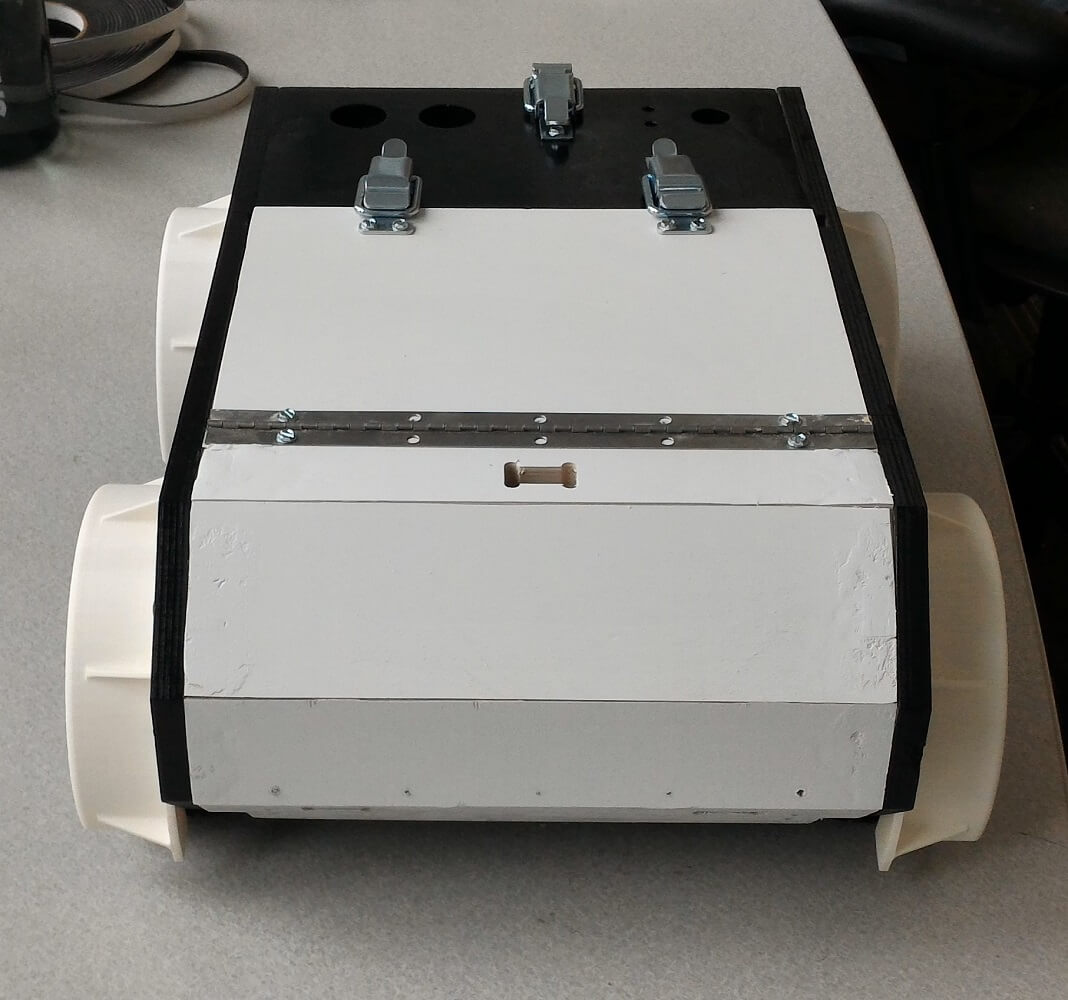
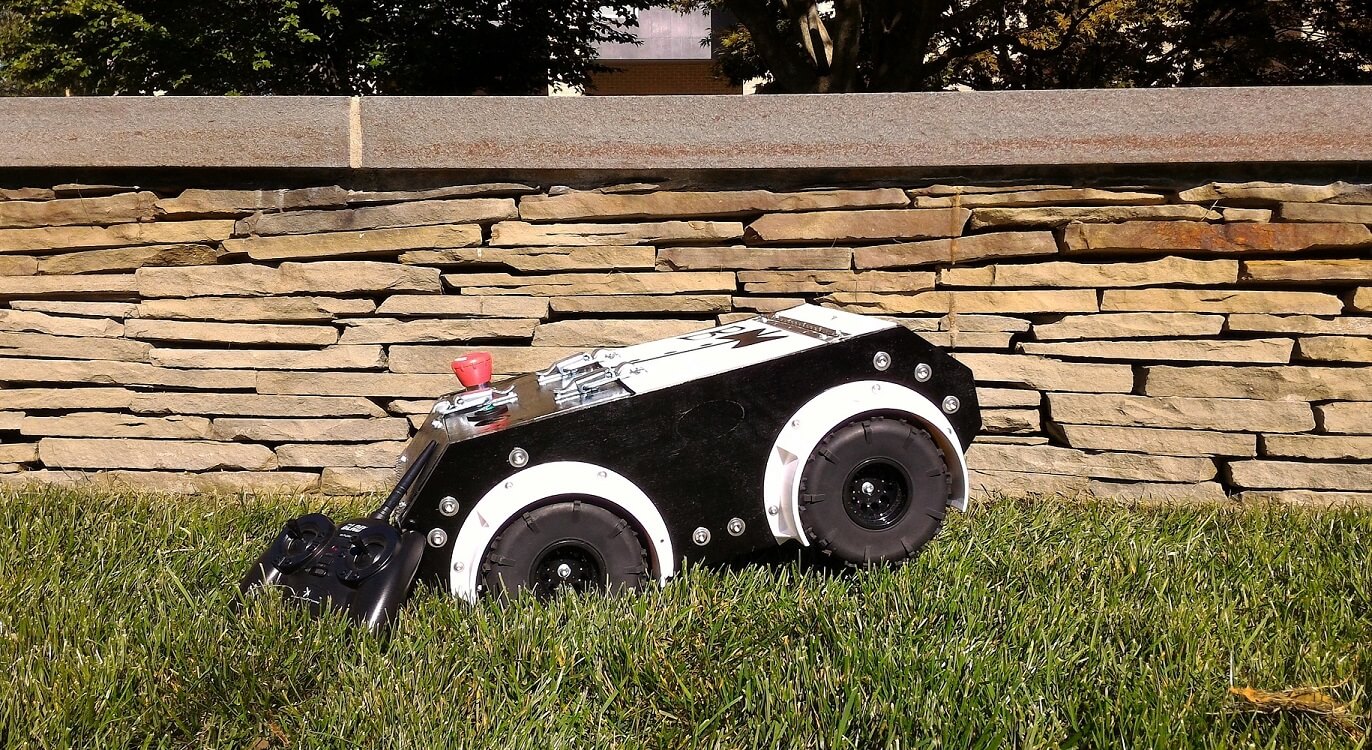
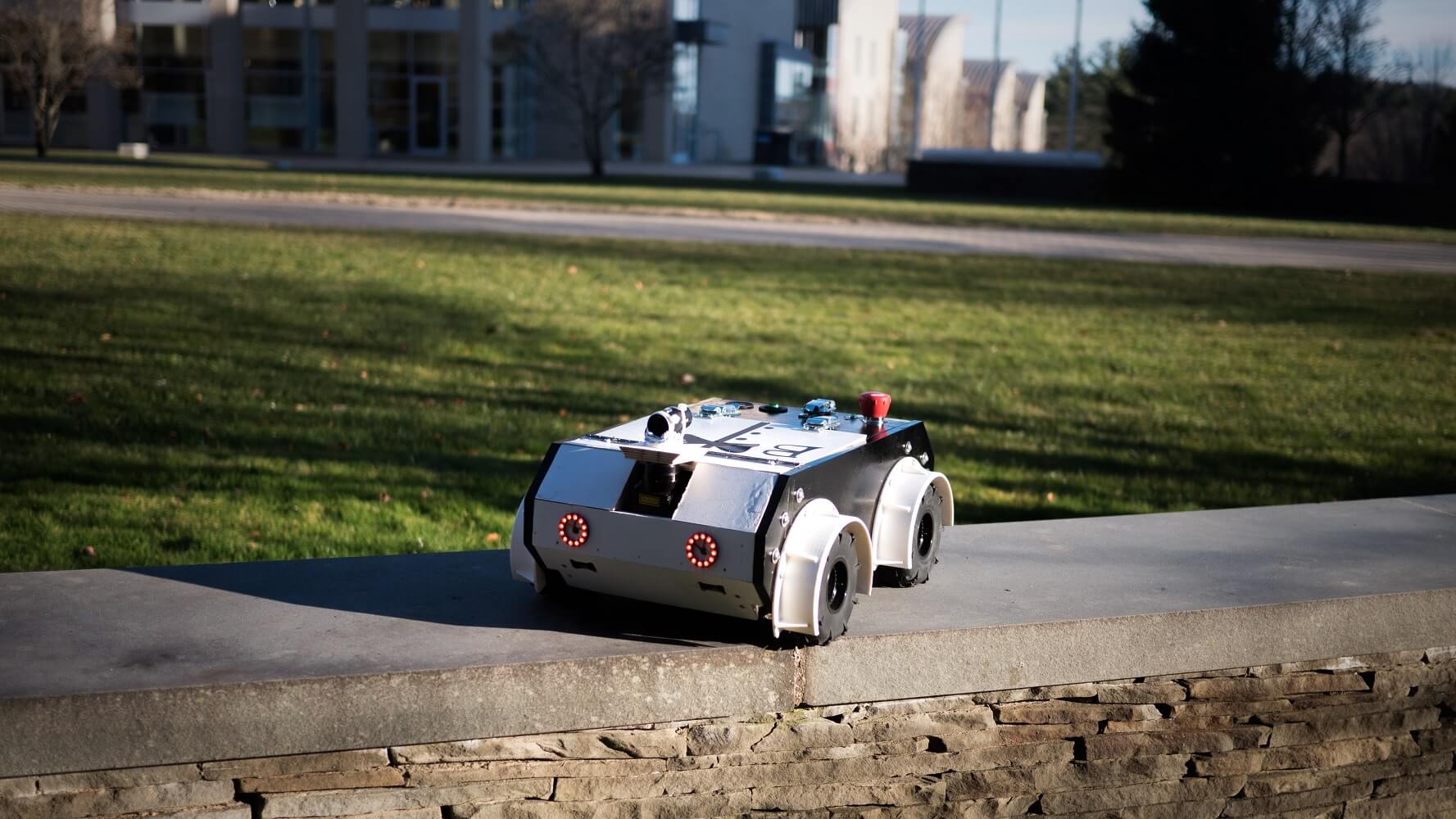
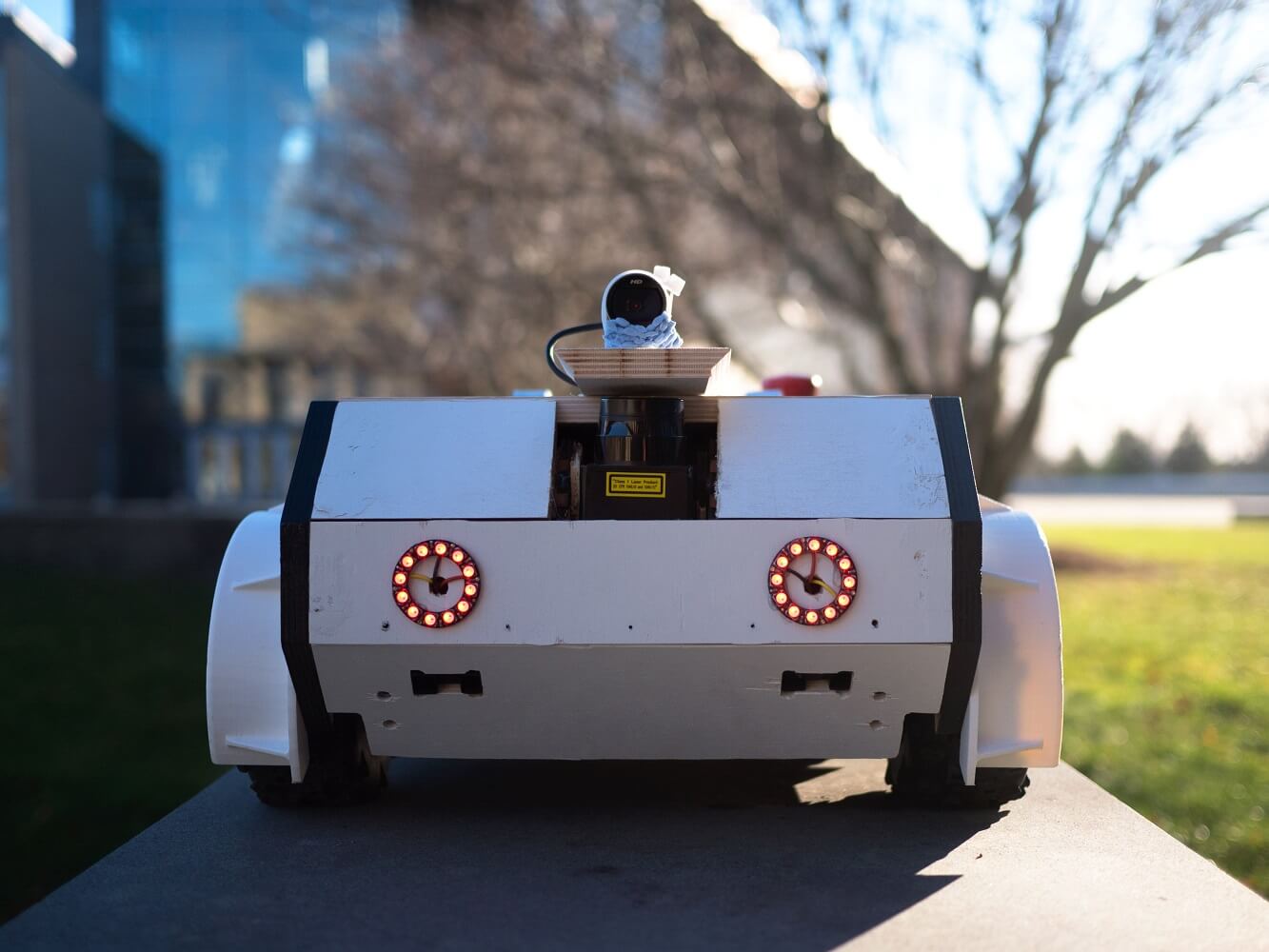

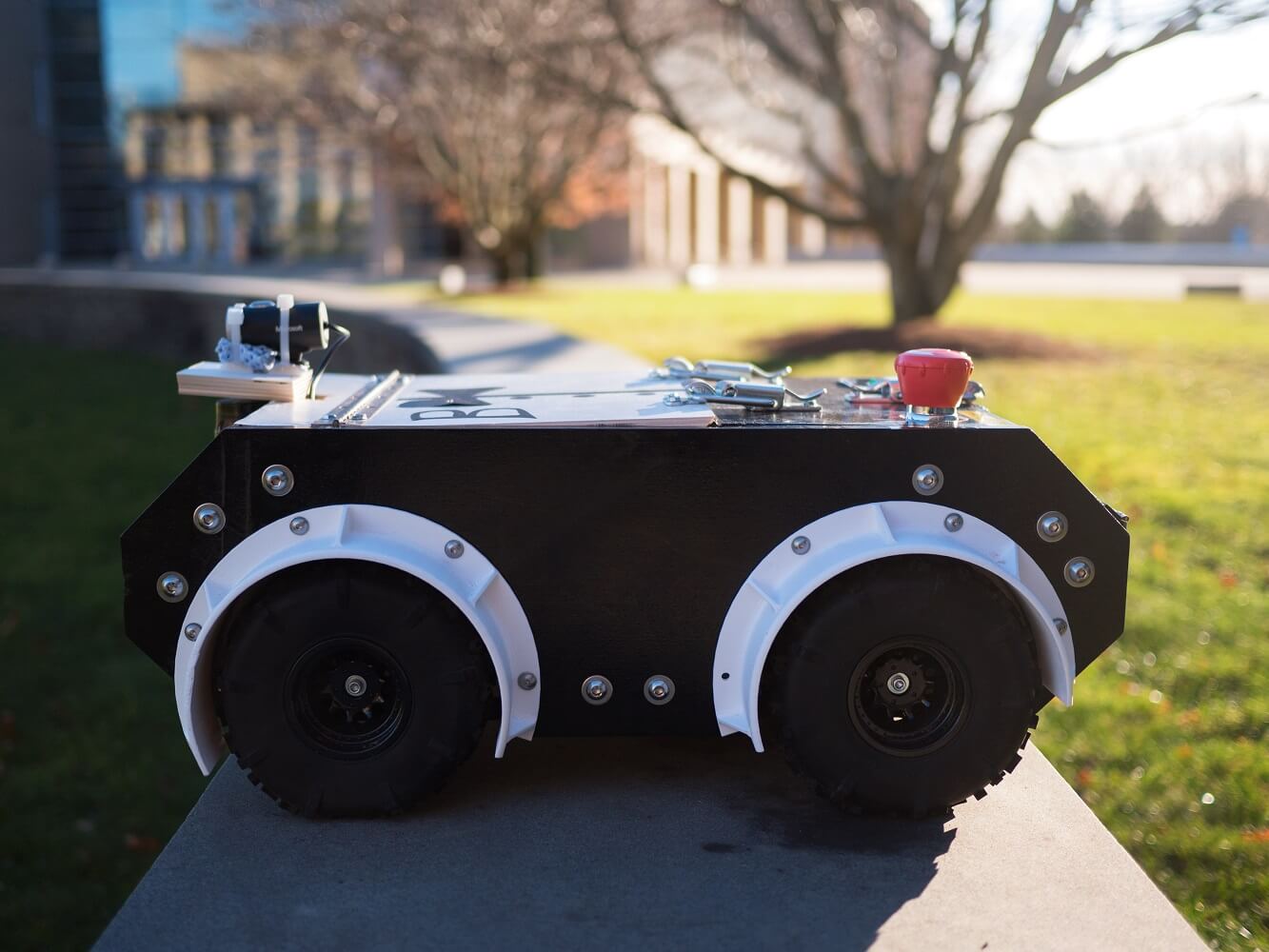

As our semester long project in my Fundamentals of Robotics class, my team and I designed the mechanical, electrical, and software systems for an autonomous ground robot. I, along with one of my team mates, took charge of mechanical design, which consisted of creating a water resistant plywood hull to house all of the electronics and sensors. Our goal was to accomplish this task in a manner that would keep all of the electronics accessible for the purpose of debugging in the future. To fulfill this goal, we created a modular design where each panel could be removed by unscrewing just a few standard bolts. In addition, we created two latched panels for the battery and main electronics tray, allowing for even quicker access.
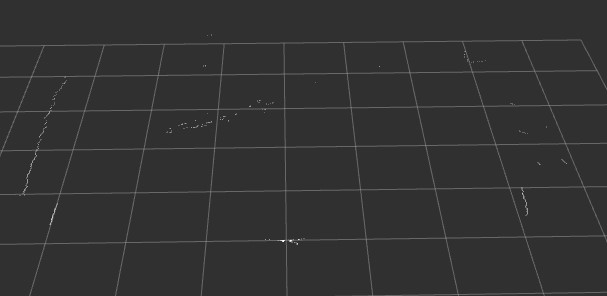
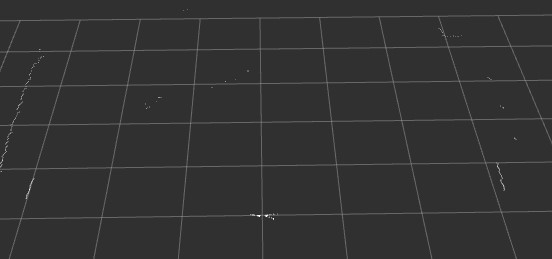
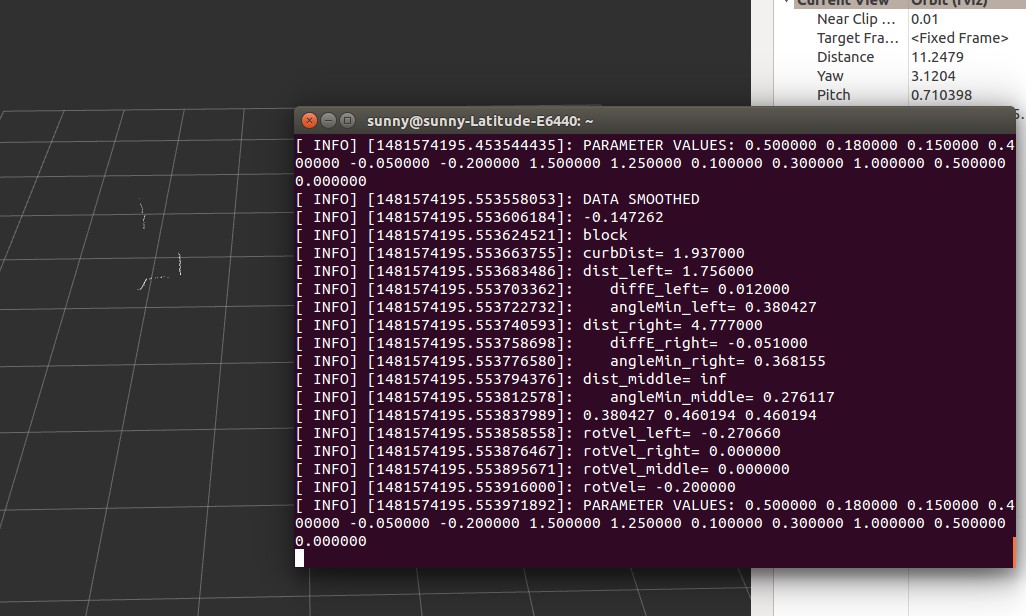
Along with designing and fabricating the mechanical system, I also worked on the software aspect. I mainly worked with the lidar data to acheive wall following and did ROS system setup. The wall I was tasked with following was rather complicated, with large protrusions as well as gaps. These irregularities eliminated the posibility of the simple solution of maintaining a distance from the wall. Instead, I wrote a program to detect and track the protrusions as the vehicle passes by, allowing a much smoother path than if it were to keep a certain wall spacing.
